Hand Gestured control car
I am making a car that can be moved by how I move my hand!!! Since this car cannot turn to I need to turn one side of the wheels to the opposite of the other side. I use an accelerometer to determine which way my hand is pointing at so it can send information to the
| Engineer | School | Area of Interest | Grade |
|---|---|---|---|
| Khang L | The Athenian School | Robotics | Incoming Junior |
Final Milestone
- I have finished my modification by replacing the gesture control with joystick control
- My biggest challenge was making the two Bluetooth modules work together as well as connecting consistently
- I learnt how to wire the components of the car as well as how to debug. I learnt how to code for the car and the hand in C++.
- I hope to achieve my dream of mechanical engineering in the future
Second Milestone
- I was able to reconnect my two Bluetooth modules and make sure they connected perfectly. I also made the car run by moving my hand on the micro
- It was very easy to fix my problem of the Bluetooth module not returning anything
- My Bluetooth module did not return anything while in AT mode when it was supposed to
- Change the controller to joysticks and build the arm
First Milestone
- I have an Uno, which will be the main brain of my car; it will send out information for my motors to run. I have a microcontroller as the main brain for my glove, which will take information from the accelerometer, then send it to the Bluetooth. Uno will receive information from the Bluetooth module to run
- I built the car chassis and made it run
- I need to make the accelerometer work
- I will make the accelerometer work and make sure the Bluetooth connection is stable
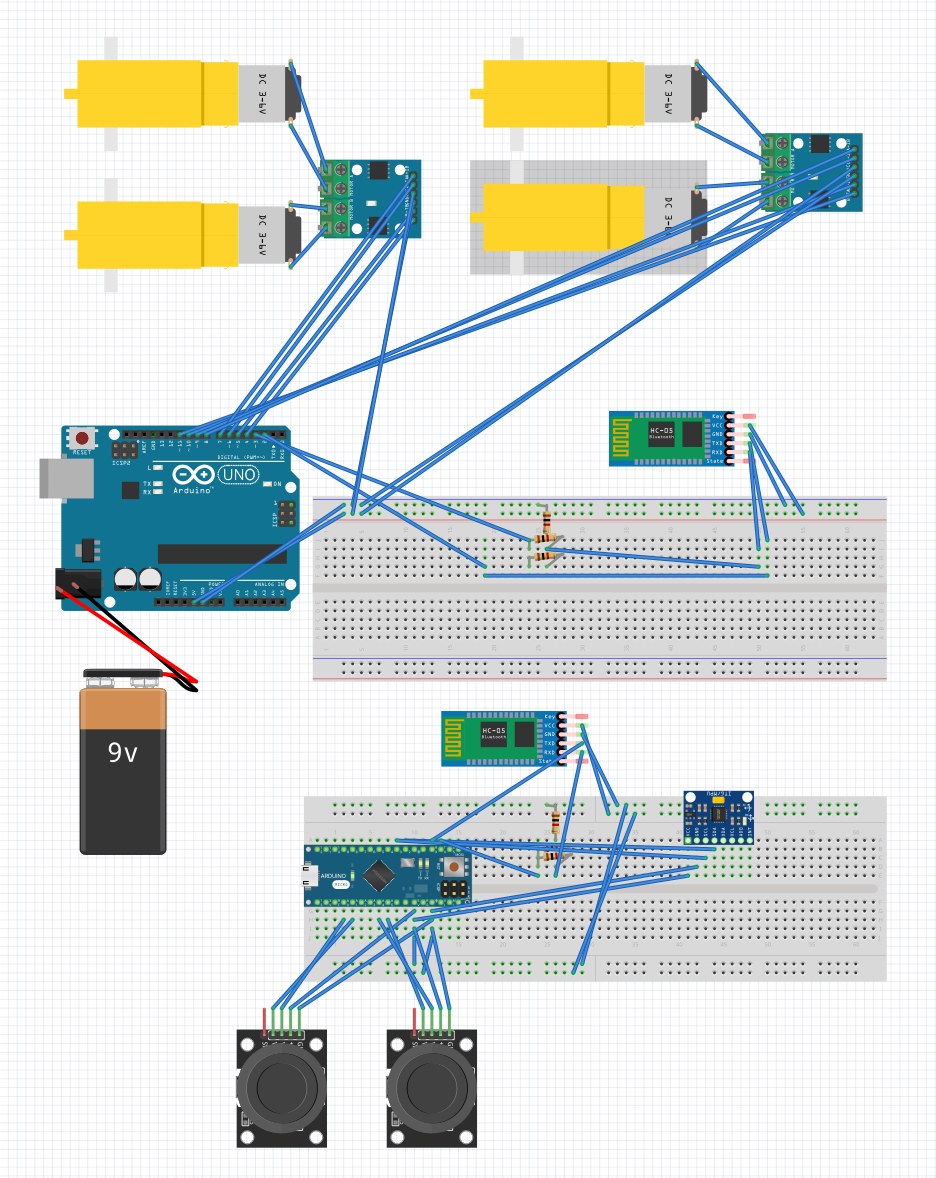
Schematics
Code
Here is the code for my hand using gesture control
#include <Wire.h>
const int MPU = 0x68;
int16_t AcX, AcY, AcZ;
int moveable = 0;
void setup() {
Serial.begin(38400);
Serial1.begin(38400);
Wire.begin();
Wire.beginTransmission(MPU);
Wire.write(0x6B);
Wire.write(0);
Wire.endTransmission(true);
delay(500);
}
void read_MPU() {
Wire.beginTransmission(MPU);
Wire.write(0x3B);
Wire.endTransmission(false);
Wire.requestFrom(MPU, 6, true);
AcX = Wire.read() << 8 | Wire.read();
AcY = Wire.read() << 8 | Wire.read();
AcZ = Wire.read() << 8 | Wire.read();
AcX = map(AcX, -17000, 17000, 0, 180);
AcY = map(AcY, -17000, 17000, 0, 180);
AcZ = map(AcZ, -17000, 17000, 0, 180);
}
void loop() {
read_MPU();
Serial.print(AcX);
Serial.print(" ");
Serial.print(AcY);
Serial.print(" ");
Serial.print(AcZ);
Serial.println(" ");
if (AcX < 60 && moveable == 0) {
moveable = 1;
Serial1.write('f');
Serial.println("f");
}
if (AcX > 130 && moveable == 0) {
Serial1.write('b');
Serial.println("b");
}
if (AcY < 60 && moveable == 0) {
moveable = 1;
Serial1.write('l');
Serial.println("l");
}
if (AcY > 130 && moveable == 0) {
moveable = 1;
Serial1.write('r');
Serial.println("r");
}
if ((AcX > 70) && (AcX < 120) && (AcY > 70) && (AcY < 120) && (moveable == 1)) {
moveable = 0;
Serial1.write('s');
Serial.println("s");
}
// put your main code here, to run repeatedly:
if (Serial1.available()) {
Serial.print((char)Serial1.read());
}
if (Serial.available())
{
Serial1.write(Serial.read());
}
}
Here is my code for my hand using joysticks
int xL, yR = 0;
int xL_center = 490;
int yR_center = 490;
void setup() {
Serial.begin(38400);
Serial1.begin(38400);
}
void read_joystick(){
xL = analogRead(A0);
yR = analogRead(A5);
}
void loop(){
read_joystick();
if (!((xL_center - 30) < xL && (xL_center + 30) > xL)) {
if (xL < 468) {
moveable = 1;
Serial.println("f");
Serial1.write('f');
}
if (xL > 600) {
moveable = 1;
Serial.println("b");
Serial1.write('b');
}
}
else if (!((yR_center - 30) < yR && (yR_center + 30) > yR)) {
if (yR < 456) {
moveable = 1;
Serial1.write('r');
Serial.println("r");
}
if (yR > 524) {
moveable = 1;
Serial1.write('l');
Serial.println("l");
}
}
else{
Serial.println("s");
Serial1.write('s');
}
}
Here is my code for the car
#include <SoftwareSerial.h>
#define rx 2
#define tx 3
char input_hand;
const int A1A=11;
const int A1B=10;
const int A2A=5;
const int A2B=4;
const int A3A=7;
const int A3B=6;
const int A4A=9;
const int A4B=8;
SoftwareSerial configBt(rx, tx);
long tm,t,d;
void setup() {
Serial.begin(38400);
configBt.begin(38400);
pinMode(tx, OUTPUT);
pinMode(rx, INPUT);
pinMode(A1A, OUTPUT);
pinMode(A1B, OUTPUT);
pinMode(A2A, OUTPUT);
pinMode(A2B, OUTPUT);
pinMode(A3A, OUTPUT);
pinMode(A3B, OUTPUT);
pinMode(A4A, OUTPUT);
pinMode(A4B, OUTPUT);
}
void forward() {
digitalWrite(A1A,LOW);
digitalWrite(A1B,HIGH);
digitalWrite(A2A,LOW);
digitalWrite(A2B,HIGH);
digitalWrite(A3A,LOW);
digitalWrite(A3B,HIGH);
digitalWrite(A4A,LOW);
digitalWrite(A4B,HIGH);
}
void backward() {
digitalWrite(A1A,HIGH);
digitalWrite(A1B,LOW);
digitalWrite(A2A,HIGH);
digitalWrite(A2B,LOW);
digitalWrite(A3A,HIGH);
digitalWrite(A3B,LOW);
digitalWrite(A4A,HIGH);
digitalWrite(A4B,LOW);
}
void left() {
digitalWrite(A1A,LOW);
digitalWrite(A1B,HIGH);
digitalWrite(A3A,LOW);
digitalWrite(A3B,HIGH);
digitalWrite(A2A,HIGH);
digitalWrite(A2B,LOW);
digitalWrite(A4A,HIGH);
digitalWrite(A4B,LOW);
}
void right() {
digitalWrite(A1A,HIGH);
digitalWrite(A1B,LOW);
digitalWrite(A3A,HIGH);
digitalWrite(A3B,LOW);
digitalWrite(A2A,LOW);
digitalWrite(A2B,HIGH);
digitalWrite(A4A,LOW);
digitalWrite(A4B,HIGH);
}
void coasting() {
digitalWrite(A1A,LOW);
digitalWrite(A1B,LOW);
digitalWrite(A3A,LOW);
digitalWrite(A3B,LOW);
digitalWrite(A2A,LOW);
digitalWrite(A2B,LOW);
digitalWrite(A4A,LOW);
digitalWrite(A4B,LOW);
}
void loop() {
if(configBt.available()) {
input_hand = configBt.read();
}
if (configBt.available()) {
Serial.print((char)configBt.read());
}
if (Serial.available())
{
configBt.write(Serial.read());
}
if (input_hand == 'f') {
forward();
Serial.println(input_hand);
}
if (input_hand == 'b') {
backward();
Serial.print(input_hand);
}
if (input_hand == 'l') {
left();
Serial.print(input_hand);
}
if (input_hand == 'r') {
right();
Serial.print(input_hand);
}
if (input_hand == 's') {
coasting();
Serial.print(input_hand);
}
}
Bill of Materials
| Part | Note | Price | Link |
|---|---|---|---|
| Adruino Uno | Logic control for car component | 16.99$ | Link |
| Adruino Micro | Logic control for hand component | 23.00$ | Link |
| MPU-6050 | Acceleration measurement for hand component | 10.99$ | Link |
| HC-05 | Bluetooth module | 9.99$ | Link |
| Screwdriver set | tool set | 7.99$ | Link |
| Solder boards | Connecting wires | 6.99$ | Link |
| Electronic kits | Electronic components | 9.99$ | Link |
| Electronic kits | Motors for main car | 9.99$ | Link |
| 9V battery clip | battery clip | 3.99$ | Link |
| 9V battery | Powering car and hand | 8.99$ | Link |
| Car chasis | hold components of the main car | 19.99$ | Link |